|
SNAP Library 6.0, Developer Reference
2020-12-09 16:24:20
SNAP, a general purpose, high performance system for analysis and manipulation of large networks
|
|
SNAP Library 6.0, Developer Reference
2020-12-09 16:24:20
SNAP, a general purpose, high performance system for analysis and manipulation of large networks
|
#include <linalg.h>
Static Public Member Functions | |
| static void | SymetricToTridiag (TFltVV &a, int n, TFltV &d, TFltV &e) |
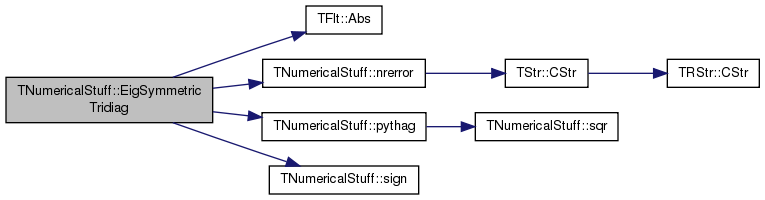
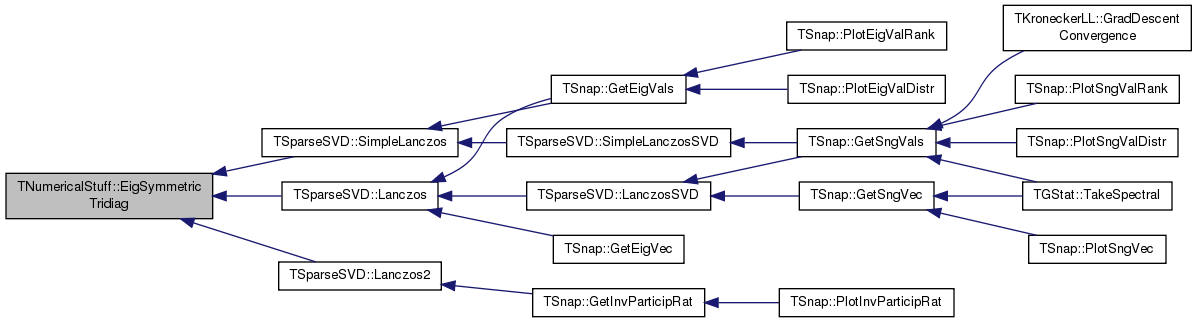
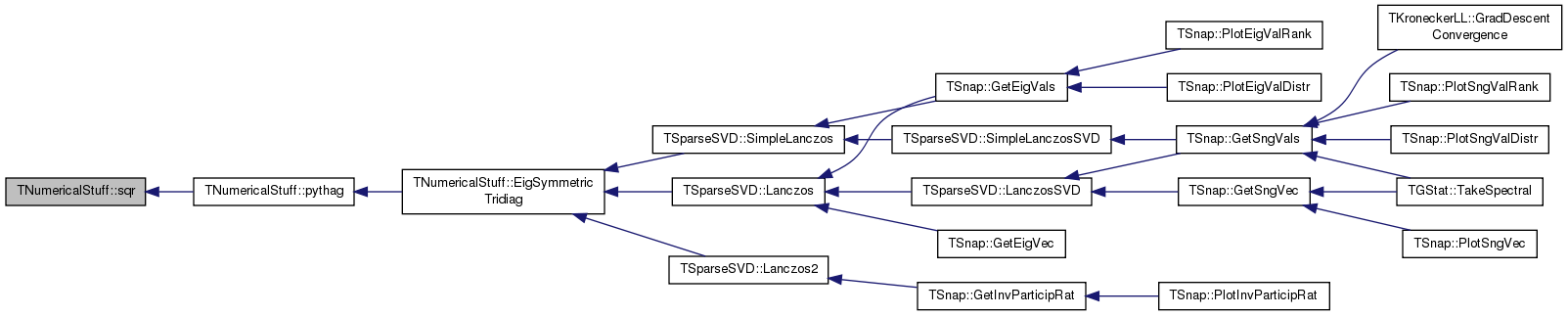
| static void | EigSymmetricTridiag (TFltV &d, TFltV &e, int n, TFltVV &z) |
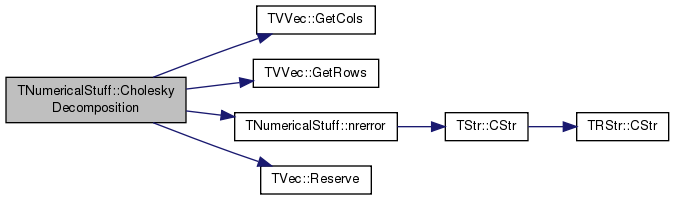
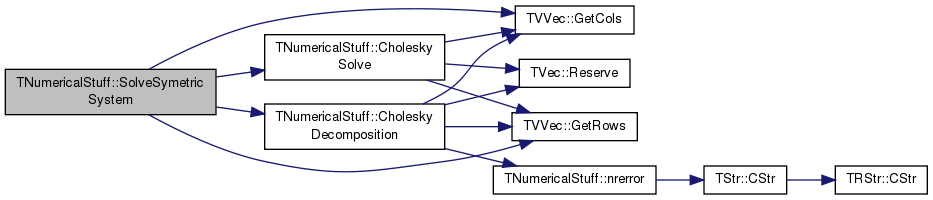
| static void | CholeskyDecomposition (TFltVV &A, TFltV &p) |
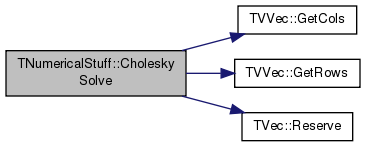
| static void | CholeskySolve (const TFltVV &A, const TFltV &p, const TFltV &b, TFltV &x) |
| static void | SolveSymetricSystem (TFltVV &A, const TFltV &b, TFltV &x) |
| static void | InverseSubstitute (TFltVV &A, const TFltV &p) |
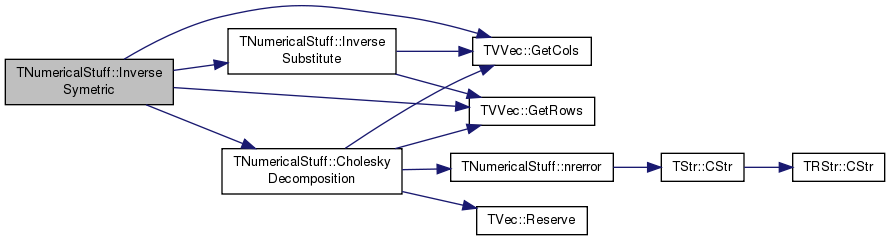
| static void | InverseSymetric (TFltVV &A) |
| static void | InverseTriagonal (TFltVV &A) |
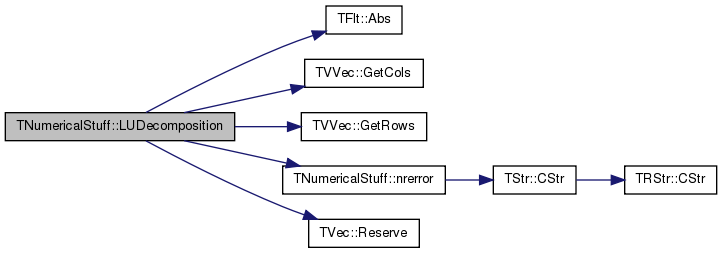
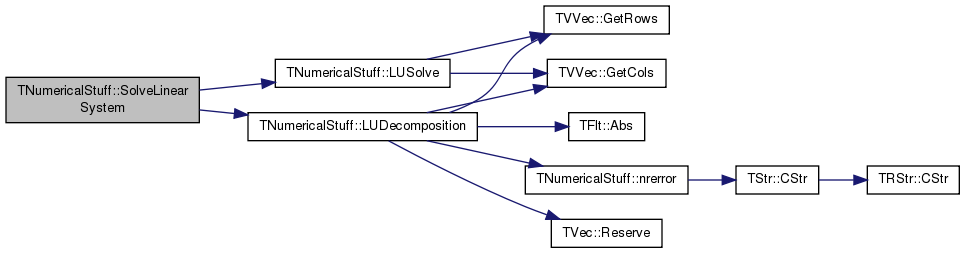
| static void | LUDecomposition (TFltVV &A, TIntV &indx, double &d) |
| static void | LUSolve (const TFltVV &A, const TIntV &indx, TFltV &b) |
| static void | SolveLinearSystem (TFltVV &A, const TFltV &b, TFltV &x) |
Static Private Member Functions | |
| static double | sqr (double a) |
| static double | sign (double a, double b) |
| static double | pythag (double a, double b) |
| static void | nrerror (const TStr &error_text) |
Definition at line 797 of file linalg.cpp.
References Assert, TVVec< TVal, TSizeTy >::GetCols(), TVVec< TVal, TSizeTy >::GetRows(), nrerror(), and TVec< TVal, TSizeTy >::Reserve().
Referenced by InverseSymetric(), and SolveSymetricSystem().

|
static |
Definition at line 815 of file linalg.cpp.
References TVVec< TVal, TSizeTy >::GetCols(), TVVec< TVal, TSizeTy >::GetRows(), IAssert, and TVec< TVal, TSizeTy >::Reserve().
Referenced by SolveSymetricSystem().

Definition at line 740 of file linalg.cpp.
References TFlt::Abs(), nrerror(), pythag(), and sign().
Referenced by TSparseSVD::Lanczos(), TSparseSVD::Lanczos2(), and TSparseSVD::SimpleLanczos().
Definition at line 843 of file linalg.cpp.
References TVVec< TVal, TSizeTy >::GetCols(), TVVec< TVal, TSizeTy >::GetRows(), and IAssert.
Referenced by InverseSymetric().

|
static |
Definition at line 872 of file linalg.cpp.
References CholeskyDecomposition(), TVVec< TVal, TSizeTy >::GetCols(), TVVec< TVal, TSizeTy >::GetRows(), IAssert, and InverseSubstitute().
|
static |
Definition at line 881 of file linalg.cpp.
References TVVec< TVal, TSizeTy >::GetCols(), TVVec< TVal, TSizeTy >::GetRows(), and IAssert.
Definition at line 909 of file linalg.cpp.
References TFlt::Abs(), Assert, TVVec< TVal, TSizeTy >::GetCols(), TVVec< TVal, TSizeTy >::GetRows(), nrerror(), and TVec< TVal, TSizeTy >::Reserve().
Referenced by SolveLinearSystem().

Definition at line 974 of file linalg.cpp.
References Assert, TVVec< TVal, TSizeTy >::GetCols(), and TVVec< TVal, TSizeTy >::GetRows().
Referenced by SolveLinearSystem().

|
staticprivate |
Definition at line 655 of file linalg.cpp.
References TStr::CStr().
Referenced by CholeskyDecomposition(), EigSymmetricTridiag(), and LUDecomposition().

|
staticprivate |
Definition at line 660 of file linalg.cpp.
References sqr().
Referenced by EigSymmetricTridiag().

|
staticprivate |
Definition at line 651 of file linalg.cpp.
Referenced by EigSymmetricTridiag().
Definition at line 994 of file linalg.cpp.
References LUDecomposition(), and LUSolve().
Definition at line 837 of file linalg.cpp.
References CholeskyDecomposition(), CholeskySolve(), TVVec< TVal, TSizeTy >::GetCols(), TVVec< TVal, TSizeTy >::GetRows(), and IAssert.
Referenced by TLogRegFit::GetNewtonStep().

|
staticprivate |
Definition at line 647 of file linalg.cpp.
Referenced by pythag().
Definition at line 668 of file linalg.cpp.
References Assert, TFlt::GetStr(), and IAssertR.

 1.8.10
1.8.10 
